Ajinkya JainHi there! I am a robotics researcher at Intrinsic.ai (an Alphabet company), where I am a part of the R&D team led by Prof. Stefan Schaal. My research lies at the intersection of artificial intelligence (AI) and machine learning (ML) with robot motion planning, dynamics, and control. I am particularly interested in developing methods that enable robots to perform dexterous manipulation tasks with robustness in the face of uncertainty. Before joining Intrinsic, I obtained my Ph.D. in robotics from the University of Texas at Austin under the guidance of Prof. Scott Niekum and Prof. Ashish Deshpande . My doctoral research focused on two key areas: developing learning algorithms for robots to acquire object interaction models from visual data and motion planners to perform robot manipulation tasks robustly under uncertainty. Prior to joining UT Austin, I obtained my Bachelors and Masters in Mechanical Engineering from IIT Kanpur. |

|
ResearchI'm interested in robot learning, dexterous robot manipulation, motion planning under uncertainty, model learning for planning and control, reinforcement learning, and optimal control. |
|
|
Open X-Embodiment: Robotic Learning Datasets and RT-X ModelsOpen X-Embodiment Collaboration, Ajinkya Jain, et al. IEEE International Conference on Robotics and Automation (ICRA), 2024 paper / webpage / code / Large-scale datasets in standardized data formats and models to enable learning “generalist” X-robot policy that can be adapted efficiently to new robots, tasks, and environments. |
|
Efficient Online Learning of Contact Force Models for Connector InsertionKevin Tracy, Zachary Manchester, Ajinkya Jain, Keegan Go, Stefan Schaal, Tom Erez, and Yuval Tassa ArXiv Dec, 2024 paper / webpage / code / An efficient and scalable approach for modeling connector insertion environments by learning a quasi-static contact force model instead of a full simulator, employing a Linear Model Learning algorithm for real-time optimal mapping without matrix inversions. |
|
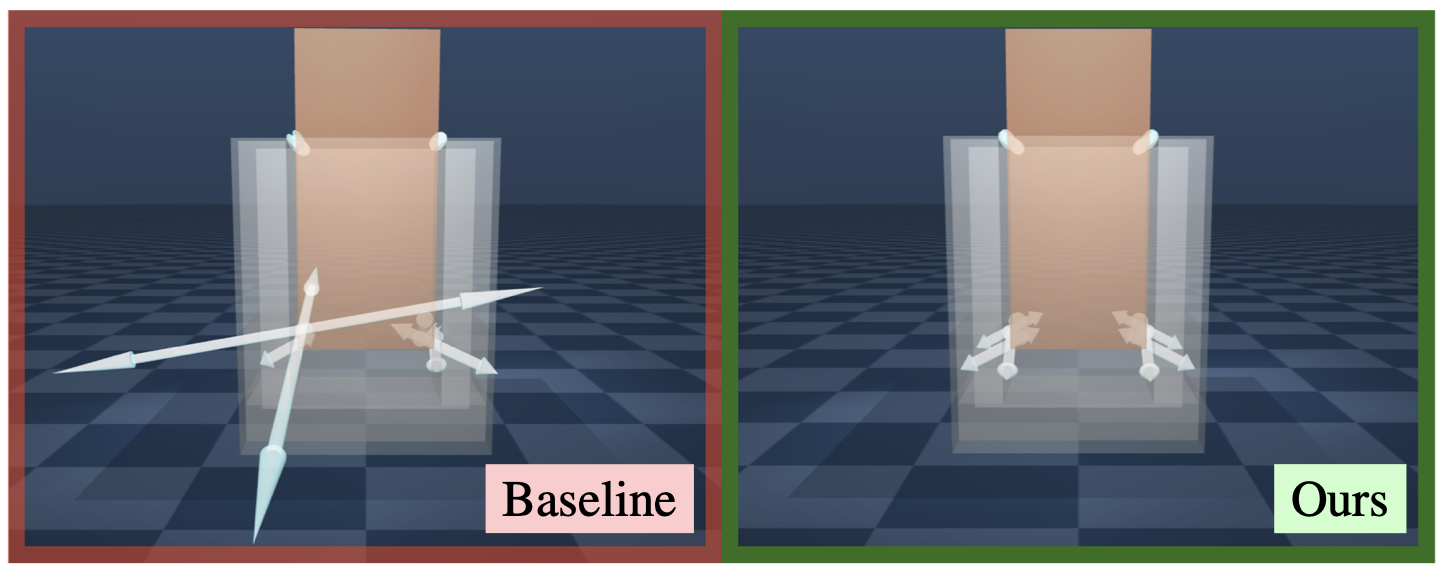
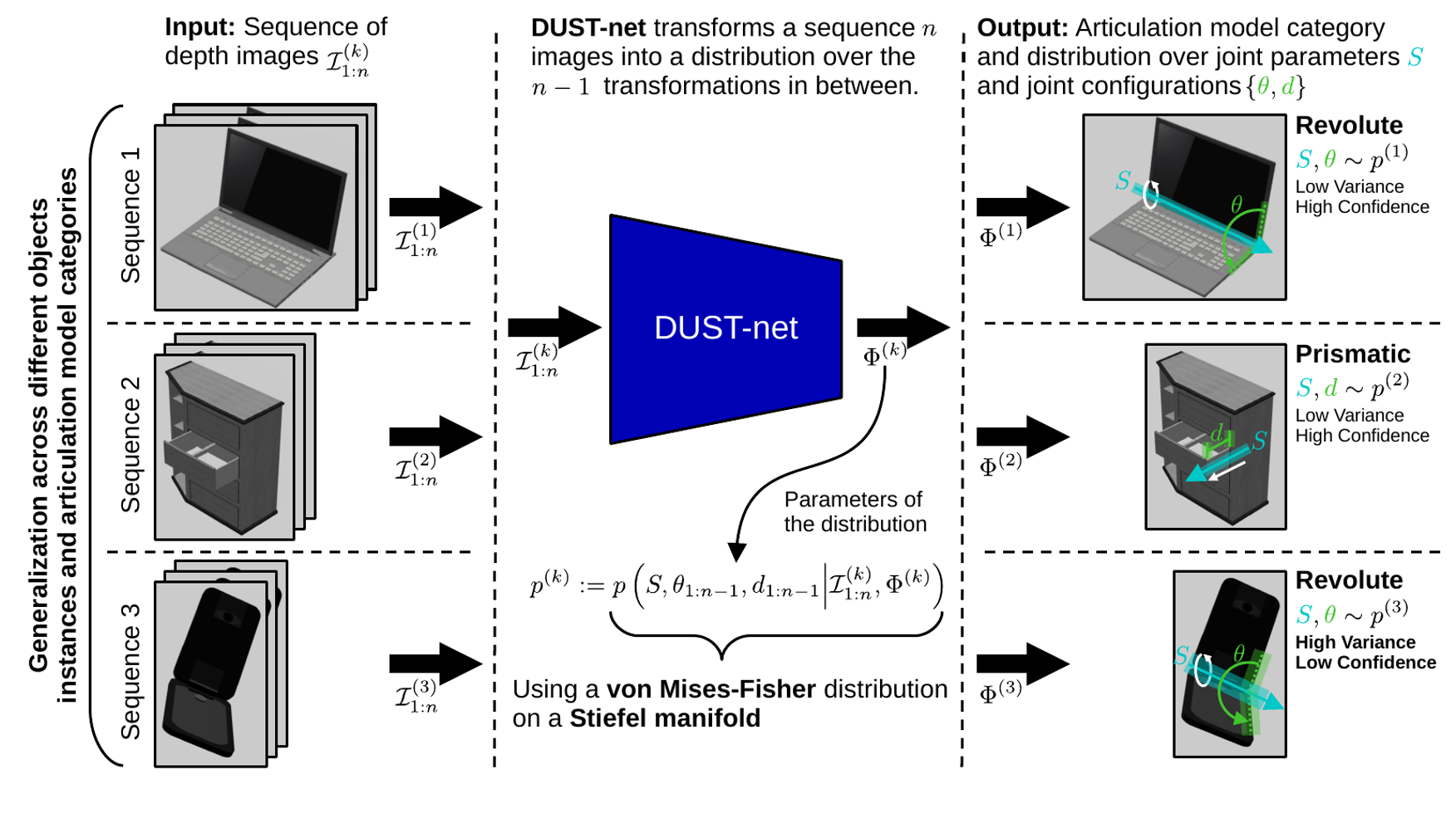
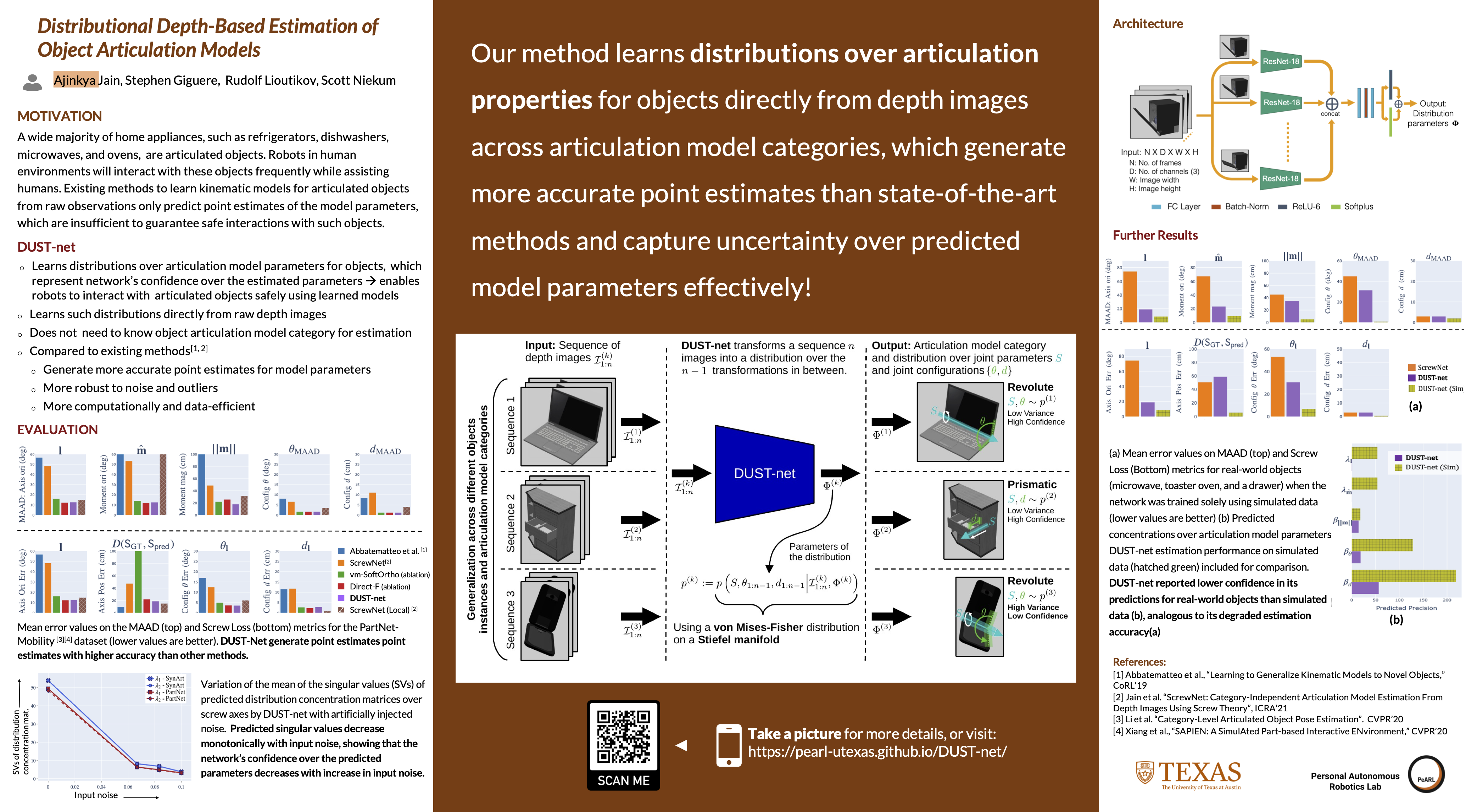
Distributional Depth-Based Estimation of Object Articulation ModelsAjinkya Jain, Stephen Giguere, Rudolf Lioutikov, Scott Niekum 5th Conference on Robot Learning (CoRL), 2021 paper / webpage / code / poster / A novel method that efficiently learns distributions over articulation model parameters directly from depth images without the need to know articulation model categories a priori |
|
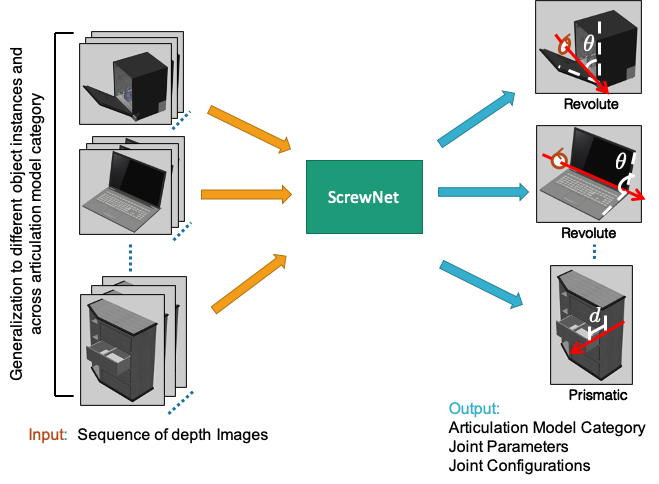
ScrewNet: Category-Independent Articulation Model Estimation From Depth Images Using Screw TheoryAjinkya Jain, Rudolf Lioutikov, Caleb Chuck, Scott Niekum IEEE International Conference on Robotics and Automation (ICRA), 2021 paper / video / webpage / code / poster / A novel method for estimating articulation models for objects directly from raw depth images without knowing their articulation type a priori using screw theory |
|
Learning Hybrid Object Kinematics for Efficient Hierarchical Planning Under UncertaintyAjinkya Jain, Scott Niekum IEEE/ RSJ International Conference on Intelligent Robots and Systems (IROS), 2020 paper / video / slides / A method for learning planning-compatible hybrid kinematics models for articulated objectsfrom human demonstrations |
|
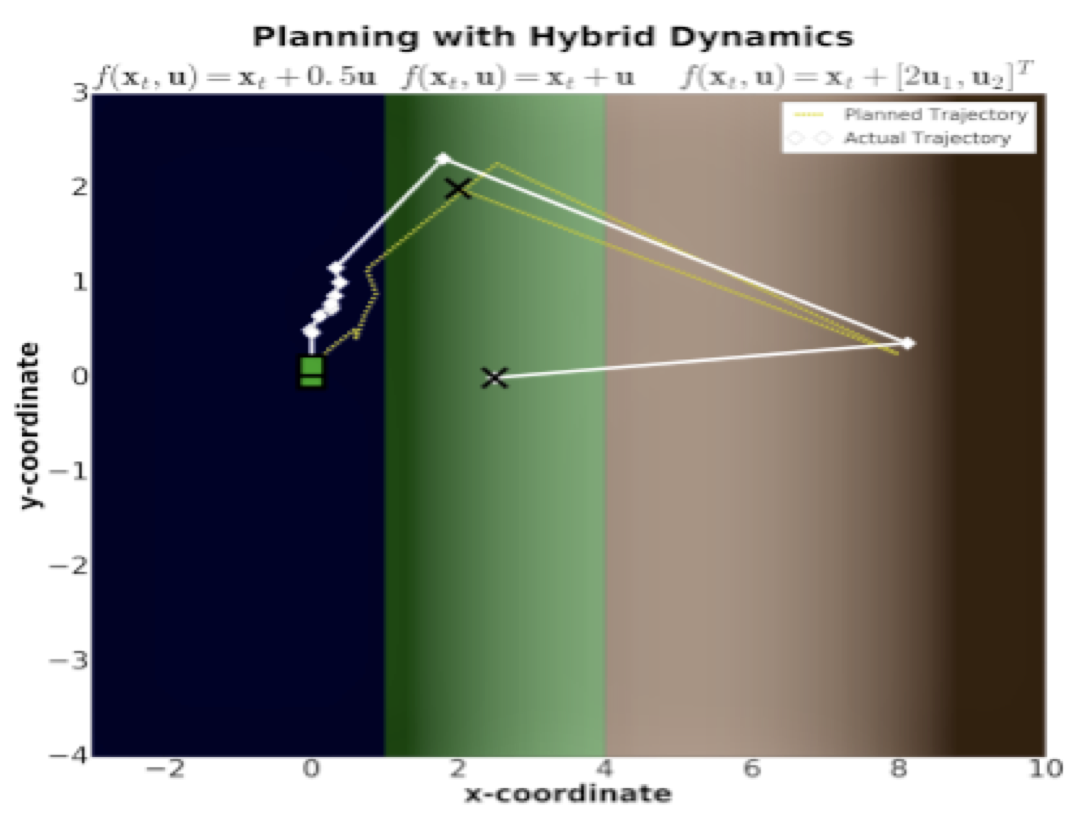
Efficient Hierarchical Robot Motion Planning Under Uncertainty and Hybrid DynamicsAjinkya Jain, Scott Niekum Conference on Robot Learning (CoRL), 2018 paper / video / code / A POMDP-based Motion planner that generates efficient motion plans leveraging object-object interactions to perform manipulation tasks under uncertainty with high success rates |
|
Belief Space Planning under Approximate Hybrid DynamicsAjinkya Jain, Scott Niekum Workshop on POMDPs in Robotics, Robotics: Science and Systems (RSS), 2017 paper / Extending Belief-space LQR to hybrid systems for robot motion planning under uncertainty |
|
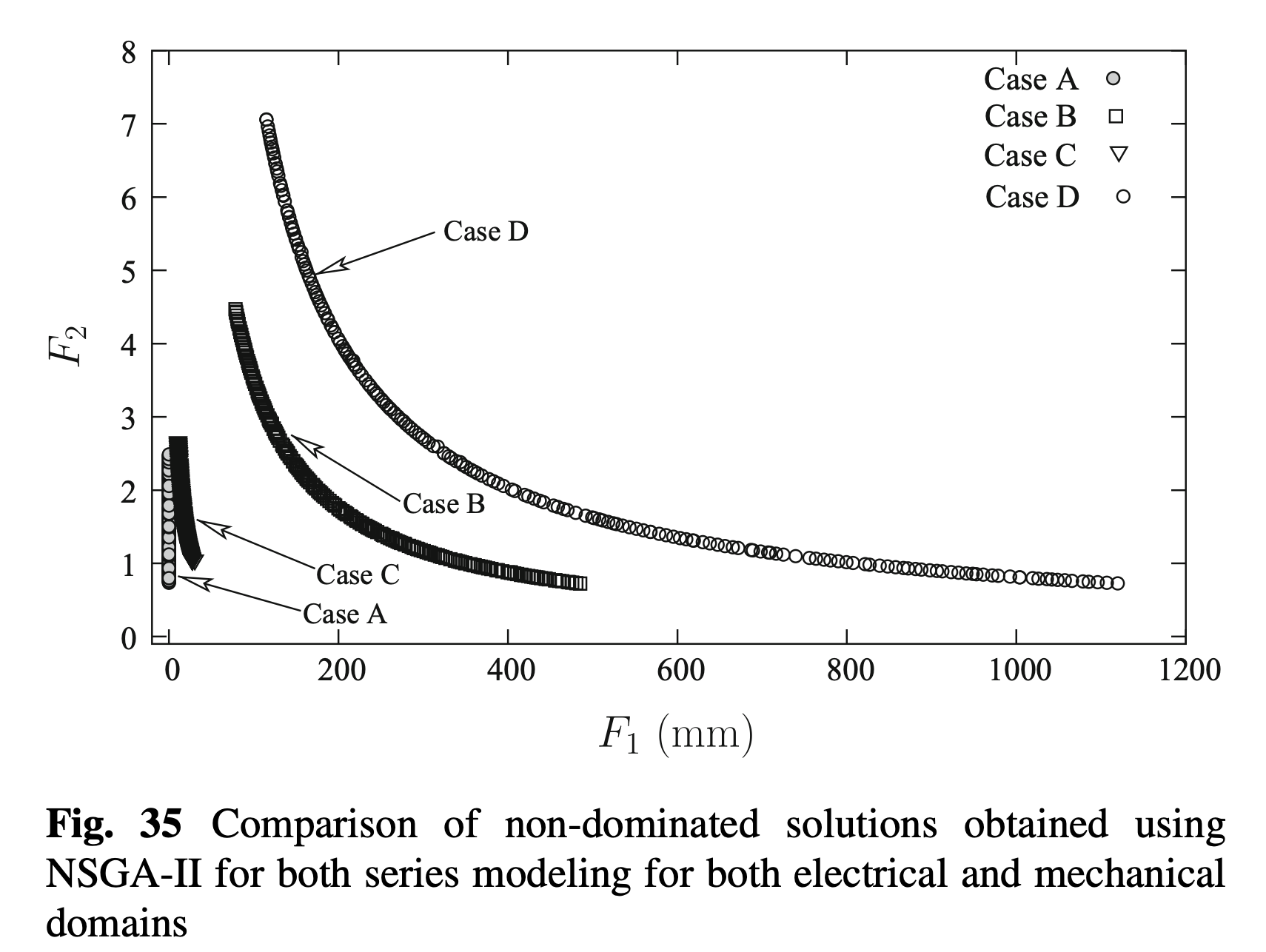
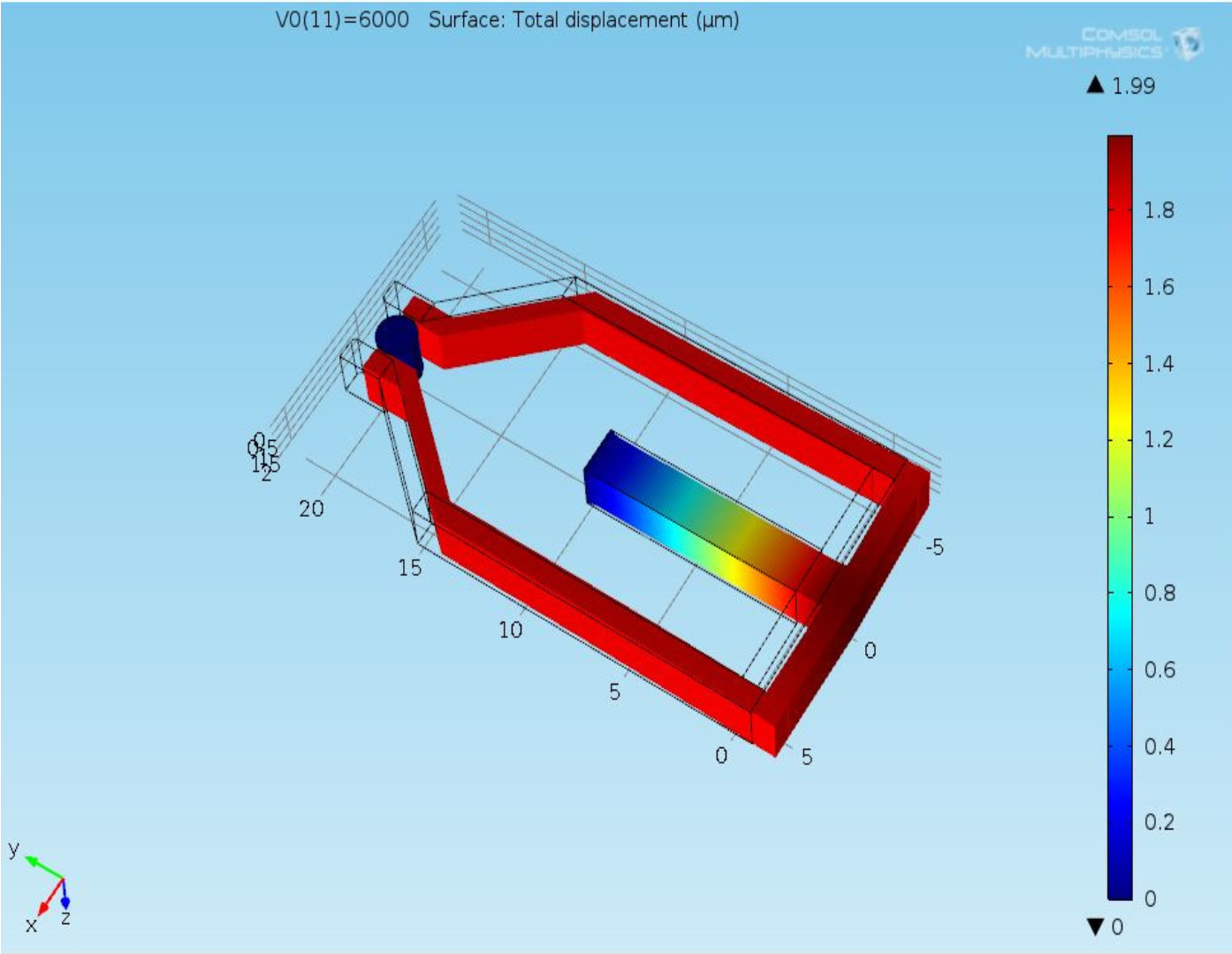
A piezoelectric model based multi-objective optimization of robot gripper designRituparna Datta, Ajinkya Jain, Bishakh Bhattacharya Structural and Multidisciplinary Optimization, Springer, 2015 paper / Multi-objective design optimization of a piezoelectric actuator driven gripper |
|
Unified Minimalistic Modelling of Piezoelectric Stack Actuators for Engineering ApplicationsAjinkya Jain, Advances in Intelligent Systems and Computing, Springer, 2014 paper / A simple, computationally-cheap, yet effective model for piezoelectric stack actuators as a replacement of black-box models used in engineering design optimization problems. |
{kind=link}
|
Design and source code from Jon Barron's website. Jekyll version from Leonid Keselman's website |